Dự án này cho thấy một hệ thống an ninh không dây, trong đó bốn cảm biến chuyển động hồng ngoại (Pir) được đặt ở bốn phía trước, phía sau, bên trái và bên phải của khu vực được che phủ. Nó phát hiện chuyển động từ bất kỳ phía nào và bật báo động nghe nhìn. Nó cũng hiển thị phía mà phát hiện chuyển động (kẻ xâm nhập). Tất cả các cảm biến gửi tín hiệu đến mạch điều khiển trung tâm không dây. Sắp xếp nguyên mẫu của tác giả được hiển thị trong Hình. 1.

Sơ đồ khối hệ thống
Sơ đồ khối hệ thống của hệ thống bảo mật không dây được hiển thị trong Hình 2. Dự án sử dụng cảm biến chuyển động Pir để phát hiện các mô-đun máy phát và máy thu tần số vô tuyến (RF) dựa trên ASK để gửi tín hiệu không dây. Nó sử dụng vi điều khiển AT89S52 (MCU) và LCD để hiển thị phía phát hiện chuyển động.
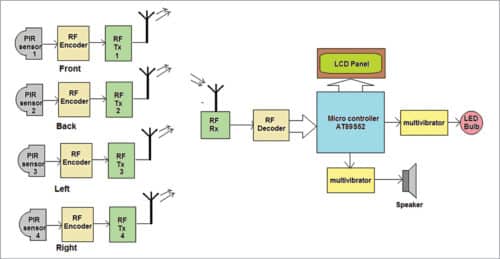
Sơ đồ khối có hai phần: bốn bộ phát với cảm biến Pir, bộ mã hóa và bộ phát RF; và bộ thu với bộ thu RF, bộ giải mã, MCU và một số mạch nghe nhìn.
Đơn vị phát
Có bốn khối truyền, mỗi khối cho mặt trước, mặt sau, bên trái và bên phải. Mỗi khối bao gồm một cảm biến Pir, chip mã hóa RF và mô-đun máy phát RF (Tx).
Cảm biến Pir
Cảm biến Pir phát hiện chuyển động bằng cách đo bất kỳ thay đổi nào về mức IR phát ra từ các vật thể. Các thiết bị thủy điện có các phần tử làm từ vật liệu tinh thể, tạo ra dòng điện khi tiếp xúc với bức xạ hồng ngoại. Những thay đổi về lượng IR rơi trên các thiết bị như vậy sẽ thay đổi điện áp được tạo ra. Đầu ra cảm biến tăng cao khi phát hiện chuyển động. Đầu ra cảm biến được trao cho chip mã hóa RF.
Bộ mã hóa RF
Chip mã hóa HT12E mã hóa đầu ra cảm biến Pir thành các luồng bit nối tiếp và đưa nó vào mô-đun RF Tx.
Máy phát RF
Bộ phát ASK điều chỉnh tín hiệu số đến từ bộ mã hóa RF bằng cách sử dụng sóng mang 434 MHz và truyền qua ăng ten của nó.
Đơn vị thu
Đây là phần điều khiển trung tâm nhận tín hiệu từ bất kỳ trong bốn cảm biến Pir ở phía máy phát. Nó đưa ra cảnh báo âm thanh và hình ảnh, và hiển thị phía phát hiện chuyển động trên LCD1.
Máy thu RF
Mô-đun này hoạt động trên tần số 434 MHz và giải điều chế các tín hiệu số nhận được trước khi gửi các luồng bit đến chip giải mã RF.
Bộ giải mã RF
Chip giải mã HT12D RF giải mã luồng bit và tạo đầu ra kỹ thuật số 4 bit song song, được đưa cho MCU.
MCU
AT89S52 MCU thực hiện các nhiệm vụ sau:
1. Phát hiện phía nơi phát hiện chuyển động từ đầu ra kỹ thuật số bộ giải mã RF
2. Hiển thị các thông báo khác nhau bao gồm cả phía chuyển động được phát hiện trên LCD1
3. Bật loa và nhấp nháy đèn LED để báo động bằng âm thanh khi phát hiện chuyển động
bảng điều khiển LCD
Bảng LCD 16 × 2 hiển thị các thông báo do MCU cung cấp.
Máy đo đa năng
Có hai máy đa năng. Một để nhấp nháy đèn LED ở tần số thấp (1Hz - 2Hz) và một để phát tín hiệu tần số âm thanh (1kHz) qua loa để phát còi báo động.
Mạch và làm việc
Có năm mạch. Trong số này, bốn mạch phát tương tự nhau, với những thay đổi nhỏ, như trong Hình 3. Mạch thứ năm, như trong Hình 4, là mạch thu.


Mạch phát
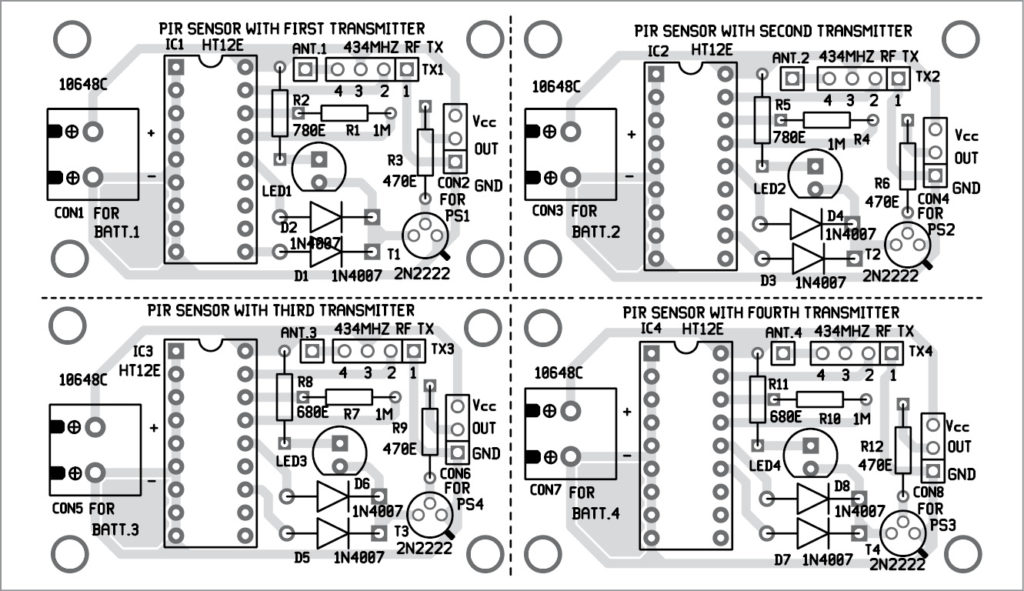
Mạch phát đầu tiên được xây dựng xung quanh IC1. Đầu ra của cảm biến Pir PS1 được cấp cho đầu vào dữ liệu AD8 (chân 10) của HT12E (IC1) sau khi đảo ngược nó qua bóng bán dẫn T1. Điốt D1 và D2 kết nối chân cho phép truyền (TE) với chân AD8, để cả hai chân nhận đầu vào từ cảm biến cùng một lúc.
LED1 được kết nối với đầu ra collector của T1, để nó nhấp nháy khi đầu ra cảm biến PS1 lên cao. Các chân địa chỉ A0 đến A7 của IC1 được kết nối với mặt đất để đặt địa chỉ 00 (0000 0000b). Đầu ra dữ liệu nối tiếp DOUT (chân 17) được cung cấp dưới dạng đầu vào dữ liệu cho mô-đun RF Tx 434 MHz (TX1). Toàn bộ mạch được cấp nguồn thông qua pin 6V (BATT.1) được kết nối qua CON1.
Ba mạch khác được hiển thị trong Hình 3 tương tự như mạch được mô tả ở trên. Sự khác biệt duy nhất là diode được kết nối với các chân dữ liệu khác nhau.
Khi cảm biến Pir PS1 phát hiện chuyển động, đầu ra của nó sẽ tăng cao. T1 tiến hành và LED1 nhấp nháy.
Các chân AD8 và TE của IC1 được kéo thấp lại với nhau thông qua điốt D1 và D2. Khi pin TE được kéo xuống thấp, IC1 truyền địa chỉ A0 qua A7 và AD8 qua AD11 thông qua mô đun RF Tx. Vì pin AD8 được kéo xuống thấp, các bit dữ liệu được truyền từ 1110 (AD11 đến AD8). Tương tự, trong các mạch khác, khi phát hiện chuyển động, chân dữ liệu tương ứng được kéo xuống thấp, do đó dữ liệu khác nhau được truyền đi, như được liệt kê trong Bảng I.

Do đó, khi một cảm biến phát hiện chuyển động từ phía của nó, mẫu bit khác nhau của D0 đến D3 được truyền đi. Ở phía người nhận, mẫu này được sử dụng để xác định phía phát hiện chuyển động.
Đơn vị thu
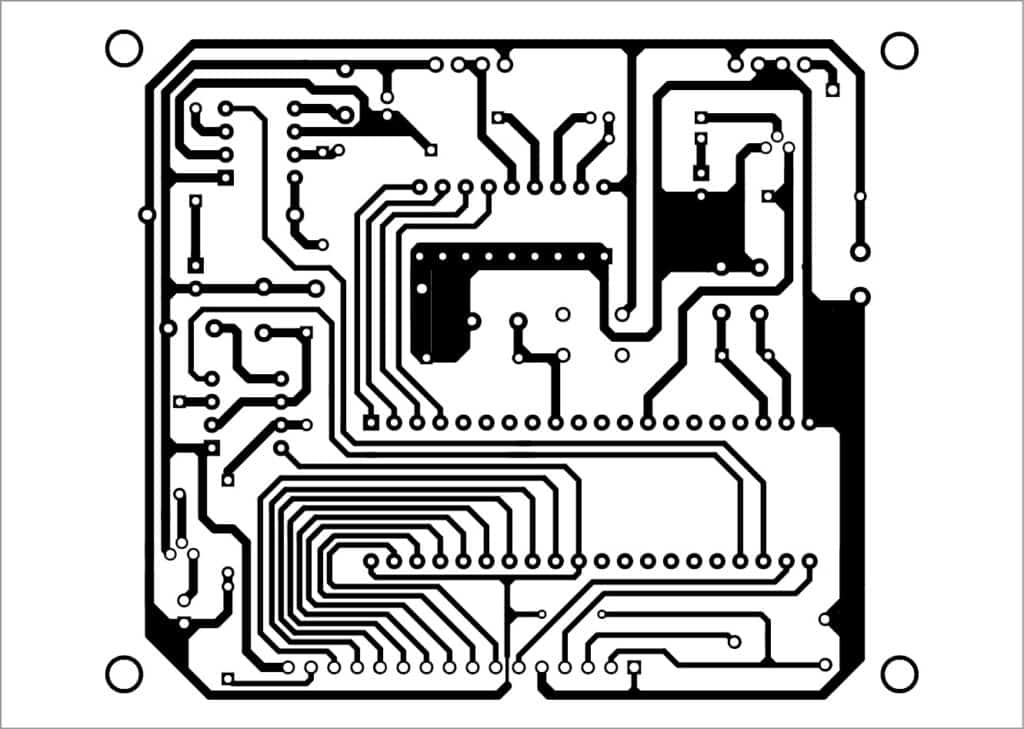
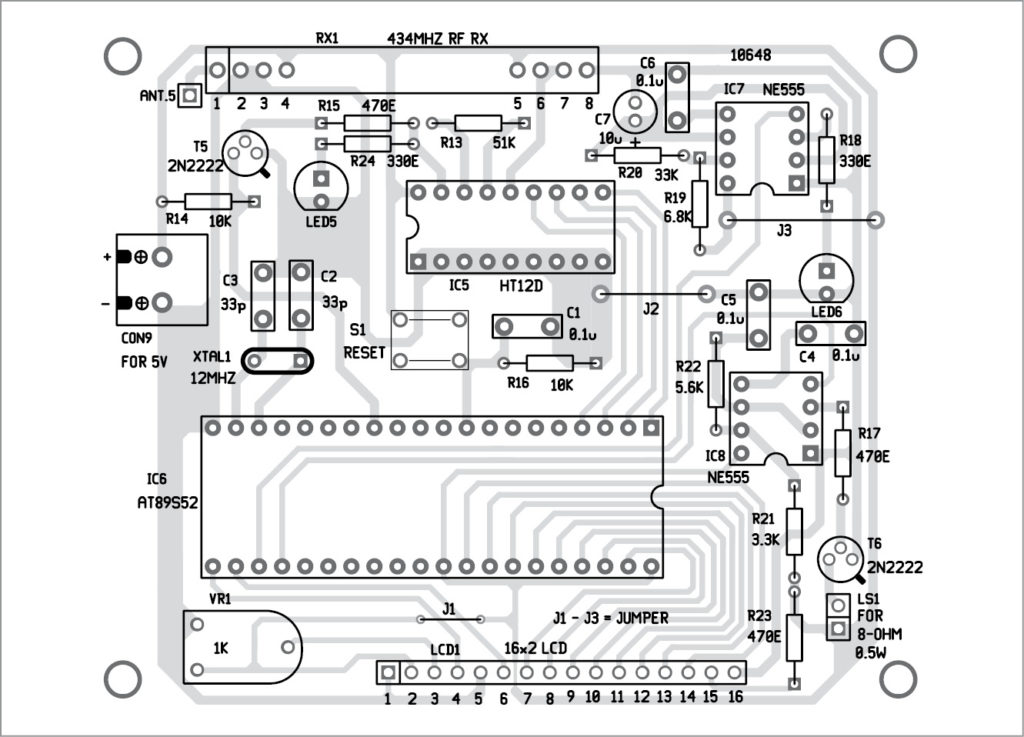
Như được hiển thị trong Hình 4, bộ thu được xây dựng bằng mô-đun RF Rx 434 MHz (RX1), chip giải mã RF HT12D (IC5), AT89S52 MCU (IC6) và bộ đa hiệu NE555 (IC7 và IC8).
Đầu ra dữ liệu nối tiếp từ mô-đun 434 RF Rx được cấp cho chân đầu vào dữ liệu 14 của bộ giải mã HT12D.
Các chân địa chỉ A0 đến A7 của HT12D được kết nối với mặt đất để đặt cùng một địa chỉ 00 (0000 0000b) làm bộ mã hóa. LED5 được kết nối với chân VT (truyền hợp lệ), nhấp nháy để cho biết rằng dữ liệu được nhận. Đầu ra VT tương tự được đảo ngược bằng cách sử dụng T5 và được cấp cho chân ngắt ngoài EX1 (chân 13) của AT89S52. Các chân đầu ra dữ liệu D8 đến D11 được kết nối tương ứng với các chân cổng P1.0 đến P1.3.
Các chân địa chỉ A0 đến A7 của HT12D được kết nối với mặt đất để đặt cùng một địa chỉ 00 (0000 0000b) làm bộ mã hóa. LED5 được kết nối với chân VT (truyền hợp lệ), nhấp nháy để cho biết rằng dữ liệu được nhận. Đầu ra VT tương tự được đảo ngược bằng cách sử dụng T5 và được cấp cho chân ngắt ngoài EX1 (chân 13) của AT89S52. Các chân đầu ra dữ liệu D8 đến D11 được kết nối tương ứng với các chân cổng P1.0 đến P1.3.
Các chân dữ liệu LCD1 D0 đến D7 được kết nối với cổng P0 của IC6. Các chân điều khiển RS và EN được kết nối tương ứng với các chân cổng P2.0 và P2.1 của IC6. Pin R / W được kết nối với mặt đất để cho phép ghi LCD1. Preset VR1 được kết nối với chân 3 để thay đổi độ sáng LCD1. Các chân đèn nền LED 15 và 16 được kết nối với + 5V thông qua R23 và mặt đất, tương ứng, để bật đèn nền LCD1.
Có hai mạch đa biến. Cả hai đều được xây dựng bằng IC NE555 và được cấu hình ở chế độ astable. Đặt lại chân 4 của cả hai bộ rung đa năng được điều khiển bởi các chân cổng MCU P2.2 và P2.3.
Một tinh thể 12 MHz được kết nối với các chân tinh thể 18 và 19 của IC6 cùng với hai tụ 33pF (C2 và C3). Mạch này cung cấp tín hiệu đồng hồ cho MCU cho các hoạt động bên trong của nó. Tụ điện C1 song song với điện trở R16 và nút ấn S1 được kết nối với chân RST 9 để cung cấp thiết lập lại thủ công cho MCU.
Quảng cáo
Khi bất kỳ cảm biến nào phát hiện chuyển động, dữ liệu được truyền qua RF Tx. Điều này được nhận và giải điều chế bởi mô-đun RF Rx. Dữ liệu này được gửi đến bộ giải mã RF HT12D (IC5), giúp phát hiện địa chỉ hợp lệ được chỉ định thông qua nhấp nháy của LED5. Sau đó, bộ giải mã chốt dữ liệu, được cung cấp trên các chân dữ liệu D8 đến D11 của IC5. Khi nhận được địa chỉ hợp lệ, chân VT của IC5 sẽ tăng cao và MCU nhận được tín hiệu ngắt. Nó được mô hình bit trên cổng P1. Theo bit dữ liệu, bất kỳ một pin (trong số bốn) sẽ thấp và phần còn lại sẽ cao.
Dựa vào chân nào thấp, MCU xác định cảm biến phát hiện chuyển động và cho biết hướng xâm nhập. Điều này được liệt kê trong Bảng II.
Theo Bảng II, MCU ngay lập tức quyết định và hiển thị thông báo Kẻ xâm nhập đã được phát hiện từ xxxx bên xxx trên LCD1. Nó cũng cho phép cả hai bộ đa năng bằng cách áp dụng đầu vào cao trên chân RST.

Bộ đa năng (IC7) nhấp nháy LED6 có tốc độ nhấp nháy 2Hz. Các giá trị thành phần cho R19, R20 và C7 được chọn theo cách tần số đầu ra khoảng 2Hz.
Một bộ đa năng khác (IC8) tạo ra âm thanh 1kHz như còi báo động qua loa (LS1). Các giá trị thành phần cho R21, R22 và C5 được chọn theo cách tần số đầu ra khoảng 1kHz.
Khi cảm biến PS1 (hoặc bất kỳ cảm biến nào) phát hiện chuyển động, đầu ra của nó vẫn ở mức cao trong khoảng năm đến mười giây vì phản ứng chậm hơn. Tiếng còi báo động và LED6 tiếp tục nhấp nháy trong khoảng mười giây. Thông báo trên LCD1 hiển thị phía phát hiện chuyển động.
Sau khi đầu ra cảm biến trở nên ổn định (thấp), cả còi báo động và LED6 đều tắt.
Chương trình phần mềm cho hệ thống bảo mật không dây
Hoàn thành vận hành hệ thống được thực hiện dựa trên chương trình được nhúng vào đèn flash bên trong của AT89S52. Chương trình thực hiện các nhiệm vụ sau:
1. Quyết định nơi phát hiện chuyển động
2. Hiển thị cảnh báo và các thông báo khác trên LCD1
3. Hiển thị bên nơi phát hiện chuyển động
4. Đèn flash LED6 và bật còi báo động khi phát hiện chuyển động
Chương trình này được viết bằng ngôn ngữ C cho 8051 họ bộ điều khiển. Nó được biên dịch trong phần mềm Keil IDE. Chương trình hoàn chỉnh là sự kết hợp của nhiều chức năng khác nhau, bao gồm:
lcd_delay () tạo độ trễ cho LCD để sẵn sàng chấp nhận lệnh mới hoặc byte dữ liệu
lcd_send_cmd () gửi byte lệnh tới LCD
LCD_send_data () gửi ký tự được hiển thị trên LCD
LCD_display_opes () hiển thị các chuỗi và thông báo khác nhau trên LCD
LCD_init () cấu hình và khởi tạo LCD
ext_int () là một hàm thường trình con ngắt được lấy đầu vào từ cổng P1
delay_10s () tạo ra độ trễ khoảng 10 giây
chính () so sánh đầu vào kỹ thuật số của P1 và phát hiện chân nào của cổng thấp. Nó cũng hiển thị trên LCD1 phía phát hiện chuyển động hoặc xâm nhập
lcd_send_cmd () gửi byte lệnh tới LCD
LCD_send_data () gửi ký tự được hiển thị trên LCD
LCD_display_opes () hiển thị các chuỗi và thông báo khác nhau trên LCD
LCD_init () cấu hình và khởi tạo LCD
ext_int () là một hàm thường trình con ngắt được lấy đầu vào từ cổng P1
delay_10s () tạo ra độ trễ khoảng 10 giây
chính () so sánh đầu vào kỹ thuật số của P1 và phát hiện chân nào của cổng thấp. Nó cũng hiển thị trên LCD1 phía phát hiện chuyển động hoặc xâm nhập
Tải xuống thư mục nguồn
Xây dựng và thử nghiệm
Bố cục PCB kích thước thực cho phần máy phát của hệ thống bảo mật không dây được hiển thị trong Hình 5 và bố trí các thành phần của nó trong Hình 6.
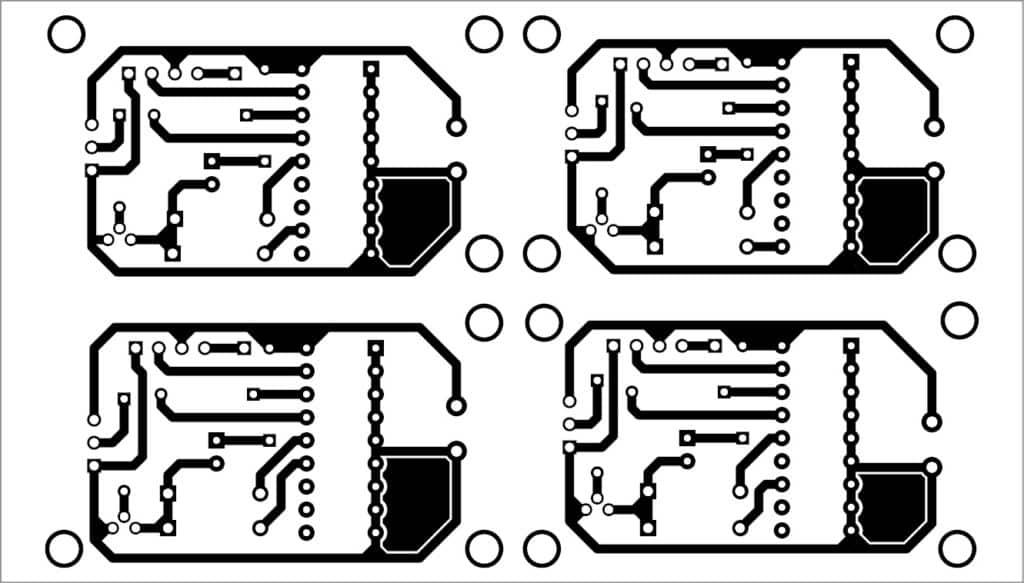
Cắt PCB trên các đường chấm chấm cho bốn bộ truyền. Kèm theo từng phần máy phát trong các hộp riêng biệt, bao gồm pin 6V. Kết nối bốn cảm biến Pir trong mỗi cụm PCB máy phát. Cài đặt chúng tại bốn địa điểm trong nhà hoặc văn phòng của bạn.
Bố cục PCB kích thước thực của thiết bị thu được hiển thị trong Hình 7 và bố trí các thành phần của nó trong Hình 8.
Tải xuống PCB và bố cục thành phần PDF: bấm vào đây
Sau khi lắp ráp các mạch trên PCB, nếu mọi thứ đều chính xác, hãy ghi chương trình (pir.hex) vào MCU bằng một lập trình viên phù hợp. Chèn AT89S52 trên đế IC được hàn trên PCB. Kèm theo PCB, công tắc và đầu nối trong một hộp thích hợp. Kết nối 5V để vận hành mạch. Mạch của bạn đã sẵn sàng để sử dụng.











Không có nhận xét nào:
Đăng nhận xét